|
Lens
Terminology
The following definitions refer to the singlet lens
diagram shown left. In the paraxial limit, however,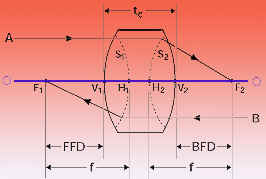 any optical system can be reduced to
the specification of the positions of the principal
and focal points. any optical system can be reduced to
the specification of the positions of the principal
and focal points.
 Symbol: Description Symbol: Description
O-O1: Optical Axis
F1: Front Focal Point: Common focal point of all rays
B parallel to optical axis and travelling from right
to left.
V1 Front Vertex: Intersection of the first surface
with the optical axis.
S1: First Principal
Surface: A surface defined by the intersection of
incoming rays B with the corresponding outgoing
rays focusing at F1.
H1: First Principal Point: Intersection of the first
principal surface with the optical axis.
f Effective Focal
Length: The axial distance from the principal points
to their respective focal points. This will be the
same on both sides of the system provided the system
begins and ends in a medium of the same index.
FFD: Front Focal
Distance: The distance from the front vertex to
the front focal point.
F2 :Back Focal Point:
Common focal point of all rays A parallel to optical
axis and travelling from left to right.
V2 Back Vertex: Intersection
of the last surface with the optical axis.
S2 :Second Principal Surface: A surface defined by
the intersection of rays A with the outgoing rays
focusing at F2.
H2: Second Principal Point: Intersection of the second
principal surface with the optical axis.
BFD: Back
Focal Distance: The distance from the back vertex
to the back focal point.
Singlet Lenses
Below, we tabulate the focal length,
back focal distance, and front focal distance for
a general singlet lens and the commonly available
singlet lenses plano-convex, plano-concave, bi-convex
(actually equiconvex), and bi-concave (actually
equiconcave). The sign conventions used are as follows:
a. R is positive
when the surface is convex when encountered moving
from left to right along the optical axis
b. R is negative
when the surface is concave when encountered moving
from left to right along the optical axis
c. BFD is positive
when F2 is to the right of V2.BFD is negative when
F2 is to the left of V2
d. FFD is positive when F1 is to the left of V1
e. FFD is negative when F1 is to the right of V1
f. The first principal
point H1 is to the right of F1 for positive f, and
to the left of F1 for negative f
g. The second principal
point H2 is to the left of F2 for positive f, and
to the right of F2 for negative f
Note:the formulas for FFD and BFD depend on the lens
orientation when the lens is assymetrical. The formula
for f does not depend on orientation. Finally, when
R is used without a subscript in the formulas below,
it is positive.
Using the formulas below, you can plot out the principal
points. Using the formulas for FFD and BFD, find
the positions of the front and back focal points
with respect to the front and back vertices. Using
the value and sign of f, find the first and second
principal points.
Spherical Aberration and Spot Size
High quality singlet lenses are of
particular interest in laser focusing and beam handling
applications because of their low cost, high damage
threshold, and the availability of standard parts.
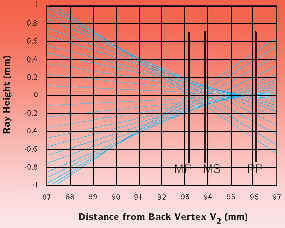
Can singlet lenses provide diffraction
limited focusing of collimated beams? Examine the
figure above. This figure represents 25 light rays
traced near the focal plane of an f =+100mm plano-convex
lens of index n = 1.515.
The radius of curvature of the convex
surface is R = 51.5mm and its center thickness is
tc = 6mm.
The rays start out parallel to the
optical axis, and were spaced equally in a region
±16mm above and below it. Therefore the lens is
operating at a relatively fast F#
The back focal distance of the lens is:

Clearly, not all rays come to focus
in the paraxial focal plane, marked PP in the figure.
Only rays very close to the optical axis focus there.
Rays that start out farther from the optical axis
come to a focus closer to the lens. The marginal
rays, which started out 16mm from the optical axis,
focus in plane MP. There is a minimum beam diameter
dMS which occurs at intermediate plane MS. dMS can
be calculated from third order aberration theory.
The result is:
where Dq blur is
the angular blur of the lens, given by:

d0 is the initial beam diameter and
K is the shape factor of the lens:

The full angular blur is plotted
below for singlet lenses as a function of shape
factor for various indices of refraction. For n
= 1.5,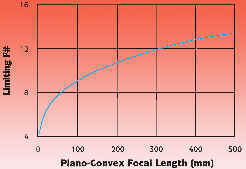 the blur is a minimum for K = 6/7. This describes
a bi-convex lens with the flatter side R2 = -6R1.
Such a lens is called a best form singlet lens,
and will focus to a spot approximately 8% smaller
than a plano-convex lens. the blur is a minimum for K = 6/7. This describes
a bi-convex lens with the flatter side R2 = -6R1.
Such a lens is called a best form singlet lens,
and will focus to a spot approximately 8% smaller
than a plano-convex lens.
In our example of a plano-convex
lens of f=+100mm oriented with plano side toward
the focus, K = 1. Using d0 = 32mm, we compute dMS
= 0.226mm. The wavelength of light has not entered
the calculation; this result is a pure geometric
optics calculation. The diffraction limited focusing
of a uniform 32mm diameter beam by a 100mm lens
can be estimated by the diameter of the first minimum
of the Airy diffraction pattern in the focal plane.
If we take l = 632.8nm, we obtain:

So geometric optics predicts a beam
diameter, dMS, due to transverse spherical aberration,
which is about 47 times diffraction limited.
In other words, spherical aberration
contributes an intrinsic blur, blur, which limits
the angular resolution of the lens. At this point Dq(blur)=Dq(diff) we may
say that a singlet, if fabricated with high precision,
approaches diffraction limited performance.
Singlet or Multiple Elements Lens
Here is a procedure to determine
whether a singlet or multiple element lens will
be needed to achieve the required spot size.
1. Determine the spot size dspot
needed for the experiment.
2. Calculate the required focal length from the
divergence properties of the beam.
For a TEM00 gaussian beam, use:
where w0 and wspot are the initial and desired beam
waists. This formula is an excellent approximation
when the distance from the initial waist w0 to the
front focal plane is much smaller than the initial
confocal parameter z0 =w02 /.
For a plane wave truncated by an aperture d0 use:

For a non-diffraction limited laser beam, use:
where full is the measured or manufacturer specified
full angle divergence.
3. Calculate the blurred focal spot
due to spherical abberation, using the shape factor,
index of refraction, and initial beam diameter:
For a properly oriented plano-convex
lens of index n = 1.5, the bracketed factor is 0.073.
If the blurred focal spot size is
greater than or equal to the desired spot size,
a multi-element lens is required to achieve the
desired spot size. This lens selection rule is based
on blur as a result of spherical aberration compared
with blur due to diffraction. It can be formulated
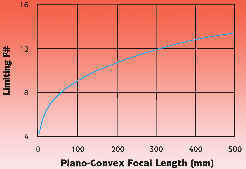
as a limiting f#. For plane wave focusing:
Using

we obtain the condition
To achieve diffraction limited focusing,
the f# has to be greater, or the speed of the single
element lens "slower" than this expression containing
the focal length. As an example, see the graph below.
Polarization States
Four numbers are required to describe
a single plane wave Fourier component traveling
in the +z direction. These can be thought of as
the amplitude and phase shift of the field along
two orthogonal directions.
a. Cartesian Representation

This is the simplest representation
to think about. Ex , Ey, fx, and fy are four real
numbers describing the magnitudes and phases of
field components along two orthogonal unit vectors
x and y. If the origin of time is irrelevant, only
the relative phase shift need be specified.
b. Circular Representation
In the circular representation, we
resolve the field into circularly polarized components.
The basic states are represented by the complex
unit vectors:
e+ is the unit vector for left circularly
polarized light; for positive helicity light; for
light that rotates counterclockwise in a fixed plane
as viewed facing into the light wave; and for light
whose electric field rotation obeys the right hand
rule with thumb pointing in the direction of propagation.
e-is the unit vector for right circularly
polarized light; for negative helicity light; for
light that rotates clockwise in a fixed plane as
viewed facing into the light wave; and for light
whose electric field rotation disobeys the right
hand rule with thumb pointing in the direction of
propagation.
As in the case of the Cartesian representation,
we write:

where E+ , E-, +, and - are four
real numbers describing the magnitudes and phases
of the field components of the left and right circularly
polarized components. Note that:

c. Elliptical Representation
An arbitrary polarization state is
generally elliptically polarized. This means that
the tip of the electric field vector will describe
an ellipse, rotating once per optical cycle.
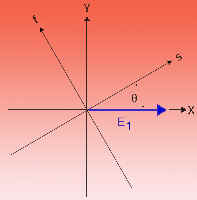
Let a be the semimajor and b be the
semiminor axis of the polarization ellipse. Let
be the angle that the semimajor axis makes with
the X-axis. Let and be the axes of a right-handed
coordinate system rotated by an angle + with respect
to the X-axis and aligned with the polarization
ellipse as shown in the diagram below.
The elliptical representation is:

Note that the phase shift o above
is required to adjust the time origin, and the parameter
is implicit in the rotation of the , axes with respect
to the X, Y axes.
Conversion Between Representations
For brevity, we will provide only
the Cartesian to Circular and Cartesian to Elliptical
transformations. The inverse transformations are
straightforward. We define the following quantities:
In the above, atan(x,y) is the four
quadrant arc tangent function. This means that atan(x,y)
= atan(y/x) with the provision that the quadrant
of the angle returned by the function is controlled
by the signs of both x and y, not just the sign
of their quotient. For example, if g2
= g1 = -1, thenφ12 above is
5π/4 or -3π/4, notπ/4.
a. Cartesian to Circular Transformation
b. Cartesian to Elliptical Transformation
Linear Polarizers
A linear polarizer is a device that
creates a linear polarization state from an arbitrary
input. It does this by removing the component orthogonal
to the selected state. Some polarizers reflect the
rejected state, creating a new, usable beam. Others
may turn the rejected beam into heat, as do polaroid
sheet and PolarcorTM polarizers.
Still others may refract the two
polarized beams at different angles, thereby separating
them. Examples are Wollaston and Rochon prism polarizers.
Suppose the pass direction of the
polarizer is determined by unit vector p. Then the
transmitted field E2, in terms of the incident field
E1, is:
where the phase shift of the transmitted
field has been ignored.A real polarizer has a pass
transmission, T||, less than 1. The transmission
of the rejected beam, T, may not be 0. If r is a
unit vector along the rejected direction, then

In the above, the phase shifts along
the two directions must be retained. Similar expressions
could be arrived at for the rejected beam. If q
is the angle between the field E1 and the polarizer
pass direction p, the above equation predicts for
the transmission:

The above equation shows that when
the polarizer is aligned so that θ= 0, T = T||.
When it is "crossed",θ=π/2, and T = T┴. The extinction
ratio is ε= T|| /T┴.
A polarizer with perfect extinction
has T┴= 0, and thus T = T|| cos2θ, is
a familiar result. Because cos2 has a broad maximum
as a function of orientation angle, setting a polarizer
at a maximum of transmission is generally not very
accurate. One has to either map the cos2θ
with sufficient accuracy to find the θ= 0 point,
or do a null measurement at θ= π± /2.
Waveplates
Waveplates operate by imparting unequal
phase shifts to orthogonally polarized field components
of an incident wave. This causes the conversion
of one polarization state into another.
There are two cases. With linear
birefringence, the index of refraction and hence
phase shift differs for two orthogonally polarized
linear polarization states. This is the operation
mode of standard waveplates.
With circular birefringence, the
index of refraction and hence phase shift differs
for left and right circularly polarized components.
This is the operation mode of polarization rotators.
a. Standard Waveplates: Linear
Birefringence
Suppose a waveplate made from a uniaxial
material has light propagating perpendicular to
the optic axis. This makes the field component parallel
to the optic axis an extraordinary wave and the
component perpendicular to the optic axis an ordinary
wave. If the crystal is positive uniaxial, ne >
no, then the optic axis is called the slow axis,
which is the case for crystal quartz. For negative
uniaxial crystals, ne < no, the optic axis is
called the fast axis.
The equation for the transmitted
field E2, in terms of the incident field E1
is:

where s and f are unit vectors along
the slow and fast axes. This equation shows explicity
how the waveplate acts on the field. Reading from
left to right, the waveplate takes the component
of the input field along its slow axis and appends
the slow axis phase shift to it. It does a similar
operation to the fast component.
The slow and fast axis phase shifts are given by:
where ns and nf are, respectively, the indices of
refraction along the slow and fast axes, and t is
the thickness of the waveplate.
To further analyze the effect of
a waveplate, we throw away a phase factor lost in
measuring intensity, and assign the entire phase
delay to the slow axis:
I the above, Δn(λ) is the birefringence ns(λ)
- nf(λ). The dispersion of the birefringence
is very important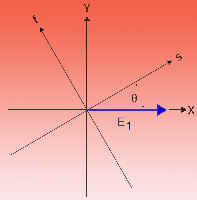 in waveplate design; a quarter waveplate at a given
wavelength is never exactly a half waveplate at
half that wavelength.
in waveplate design; a quarter waveplate at a given
wavelength is never exactly a half waveplate at
half that wavelength.
Let E1 be initially polarized along
X, and let the waveplate slow axis make an angle
ξ with the X-axis. This orientation is shown in
the figure below.
When the waveplate is placed between
parallel and perpendicular polarizers the transmissions
are given by:
Note: is
only a function of the waveplate orientation, and
f is only a function of the wavelength, the birefringence
is a function of wavelength and the plate thickness.
For a full waveplate:
φ = 2mπ, T|| = 1, and T┴= 0, regardless
of waveplate orientation.
For a half waveplate:
φ= (2mπ + 1), T|| = cos22θ,
and ┴T= sin22θ.
This transmission result is the same
as if an initial linearly polarized wave were rotated
through an angle 2θ. Thus, a half waveplate finds
use as a polarization rotator.
For a quarter waveplate:
φ= (2mπ + 1)/2; i.e. an odd multiple of π/2. To
analyze this, we have to go back to the field equation.
Assume that the slow and fast axis unit vectors
s and f form a right-handed coordinate system such
that s x f = +z, the direction of propagation. To
obtain circularly polarized light, linearly polarized
light must be aligned midway between the slow and
fast axes. There are four possibilities listed in
the table below.
b. Multiple Order Waveplates
For the full, half, and quarter waveplate
examples given in the preceeding section, the order
of the waveplate is given by the integer m. For
m > 0, the waveplate is termed a multiple order
waveplate. For m = 0, we have a zero order waveplate.
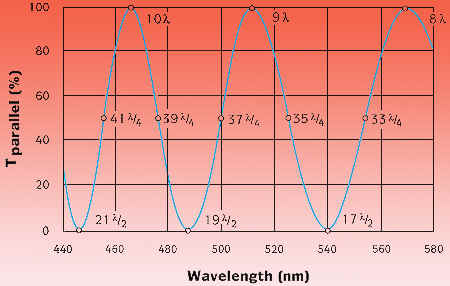
The birefringence of crystal quartz
near 500nm is approximately 0.00925. Consider a
0.5mm thick crystal quartz waveplate. A simple calculation
shows that this is useful as a quarter waveplate
for 500nm; in fact, it is a 37/4 waveplate at 500nm
with m = 18. Multiple order waveplates are inexpensive,
high damage threshold retarders. Further analysis
shows that this same 0.5mm plate is a 19l/2 half
waveplate at 488.2nm and a 10 full waveplate at
466.5nm. The transmission of this plate between
parallel polarizers is shown in the above figure
as a function of wavelength. The retardance of the
plate at various key points is shown. Note how quickly
the retardance changes with wavelength. Because
of this, multiple order waveplates are generally
useful only at their design wavelength.
c. Zero Order Waveplates
As discussed above, multiple order
waveplates are not useful with tunable or broad
bandwidth sources (example: femtosecond lasers).
A zero order waveplate can greatly improve the useful
bandwidth in a compact, high damage threshold device.
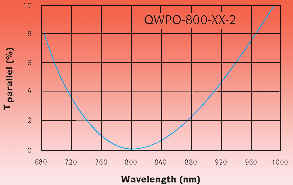
As an example, consider the design
of a broadband half waveplate centered at 800nm.
Maximum tuning range is obtained if the plate has
a single p phase shift at 800nm. If made from a
single plate of crystal quartz, the waveplate would
be about 45mm thick, which is too thin for easy
fabrication and handling. The solution is to take
two crystal quartz plates differing in thickness
by 45 mm and align them with the slow axis of one
against the fast axis of the other. The net phase
shift of this zero order waveplate is . The two
plates may be either air-spaced or optically contacted.
The transmission of an 800nm zero order half waveplate
between parallel polarizers is shown in the figure
below using a 0-10% scale. Its extinction is better
than 100:1 over a bandwidth of about 95 nm centered
at 800nm.
d. Achromatic Waveplate
At 500 nm, a crystal quartz zero
order half waveplate has a retardation tolerance
of l/50 over a bandwidth of about 50nm. This increases
to about 100nm at a center wavelength of 800nm.
However, there is a waveplate design that can give
an even larger bandwidth.
If two different materials are used
to create a zero or low order waveplate, cancellation
can occur between the dispersions of the two materials.
This requires a judicious choice of thicknesses.
Then, the net birefringent phase shift can be held
constant over a much wider range than in waveplates
made from one material. The ACWP-series crystal
quartz and MgF2 Achromatic Waveplates are used in
high power, air-spaced designs.
Three wavelength ranges are available
in both quarter and half wave retardances. Retardation
tolerance is better than /100 over the entire wavelength
range. We plot the intensity transmission and the
actual phase shift for each design versus wavelength.
For quarter waveplates, perfect retardance is a
multiple of 0.25 waves, and transmission through
a linear polarizer must be between 33% and 67%.
(In all but the shortest wavelength design, quarter
wave retardation tolerance is better than /100.)
For half waveplates, perfect retardance is 0.5 waves,
while perfect transmission through a linear polarizer
parallel to the intitial polarization state should
be zero.
e. Dual Wavelength Waveplates
Dual wavelength waveplates have a
number of applications. One common appliction is
separation of different wavelengths with a polarization
beam splitter by rotating the polarization of one
wavelength by 90°, and leaving the other unchanged.
This application frequently occurs in nonlinear
doubling or tripling laser sources such as Nd:YAG
(1064/532/355/266).
In single waveplate applications,
a more robust approach is to combine two quartz
waveplates with their optical axes orthogonal to
one another. In this configuration, the temperature
dependence is a function of the thickness difference
between the waveplates, resulting in excellent temperature
stability. The retardation of the compound waveplate
is also a function of the thickness difference,
so a zero order waveplate can be realized, resulting
in a very wide bandwidth.
f. Low Order Dual Wavelength
Waveplates
Low order dual wavelength waveplates
offer the temperature and stability of a zero order
waveplate while still meeting the specified retardation
at two different wavelengths. These high energy
air- spaced waveplates, made of magnesium flouride
and crystal quartz, are perfect for OPOs, spectrophotometry,
femtosecond pulses, and continuum generation. In
addition, low order dual waveplates can rotate the
polarization of a single wavelength while not affecting
the polarization of a second wavelength.
|